The Human Crosshair Placement Approach
Expert CSGO players constantly adjust their crosshair placement, even when no enemies are visible. The predictive crosshair placement process [1] focuses a player's crosshair at a likely location where an enemy will appear. Predictive crosshair placement is a crucial skill because it enables faster reactions. It does so by decreasing the amount of crosshair movement required when an enemy appears.
Predictive crosshair placement is challenging to learn because it depends on a lot of context: a player's location, the map's geometry, enemies' locations, and teammates' crosshair placements. As shown by the green boxes in the video on the right, the player's location and map geometry create corners where enemies may appear. Information about enemies' positions and teammates' crosshair placements allow a player to filter down the green boxes into a smaller set of corners not covered by teammates where enemies are likely to appear.
In this post, I will define an algorithm for computing the predictive crosshair placement corners where enemies may appear based on the player's position and the map's geometry. Brennan Shacklett and I implemented this algorithm in his RLpbr renderer. A later post will cover how to use enemies' positions and teammates' crosshair placements to filter these corners.
Algorithm For Finding The Important Corners
In order to algorithmically compute the corners for crosshair placement, I need to formalize the concept of "corners where enemies may appear". First, I will list the algorithm's inputs. Then, I will more formally define the corners, the algorithm's output. Finally, I will describe the algorithm.
Algorithm Inputs

- Map Geometry - Let G be the map's geometry, such as the floors and walls. I get this data by exporting CSGO's BSP map files to GLTF files with the vsource decompiler. GLTF files can be read by other renderers like Blender and RLpbr.
- Continuous Locations Where A Player May Stand - Let P be all the places a player can stand. I get this data from the navigation mesh's 3D axis-aligned bounding boxes (AABB). The image on the right titled Navmesh shows this mesh. CSGO's bots use the mesh to walk through the map, as they know they can stand in any place in the green boxes. I extend the boxes up by 72 units (the player's height) so P's AABBs contain entire character model, not just feet.
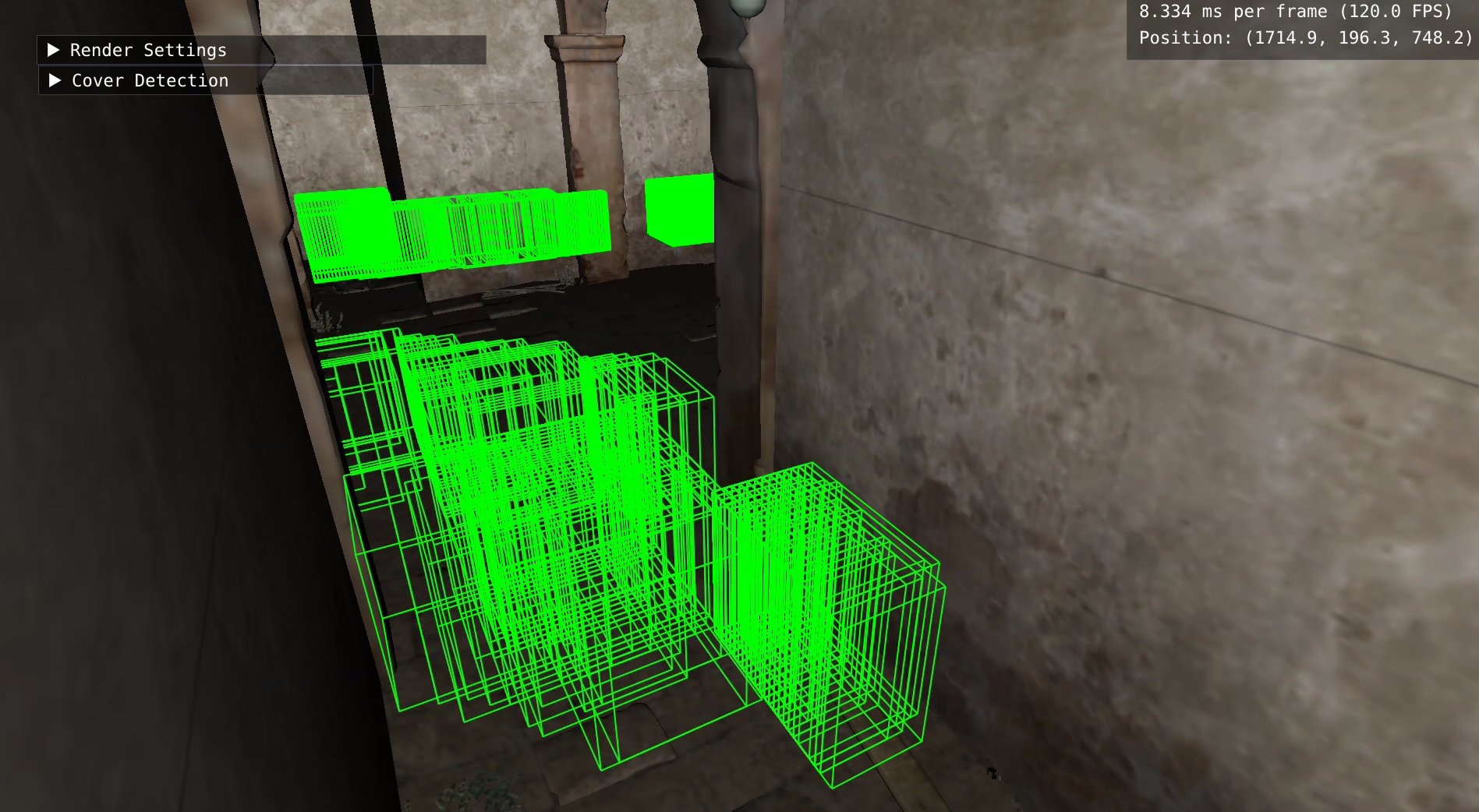
- Discretization of the Map - Let V be the voxels that discretize all possible locations for a character model in the map, even in the sky or under the ground. I compute this data by splitting the map's coordinates into voxels of size 32x32x72 units with a stride of 2x2x72 units. The voxels are of size 32x32x72 to match the size of a player. The image on the right titled Voxels shows some of these voxels. The voxels overlap (the stride 2x2x72 is far less than the size 32x32x72) so there are different voxels for small movements, like a jiggle peak where one voxel is fully behind cover and the other voxel has the player's shoulder exposed.
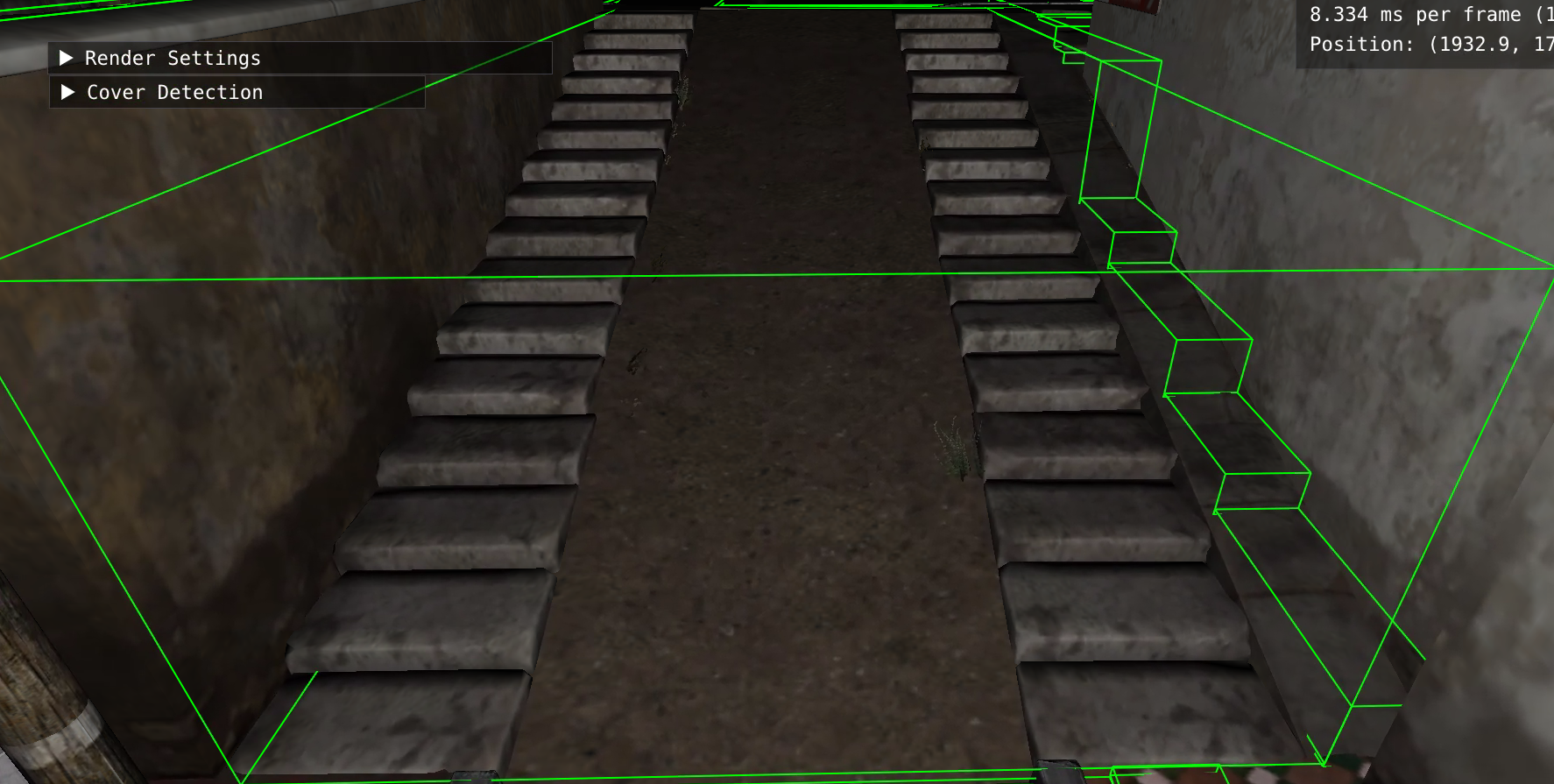
- Discrete Locations Where A Player May Stand - Let Q be the voxels that discretize all the places a player can stand in the map. This is an intersection of P, a continuous set of all the places a player can stand, and V, the discretization of the map into player-sized voxels. Also, we need to account for the ground height at every voxel. For large slopes like the one in the image on the right titled Slope, P's AABBs may be large. This causes the voxels to clip into the ground, which is invalid since players can't stand inside the ground. We ensure all voxels are valid standing locations by adjusting for the ground height at each voxel's center. We find the ground height by tracing rays up from the bottom of P's AABBs to the first intersection with the map geometry in G.
- Locations For A Player's Eyes - Let E be all possible locations for a player's eyes. I compute this by creating a 2D grid for each AABB in P with cells of size 20x20 units. At each point in the grid, I create an eye point e that is 64 units above the ground. I use the same technique for finding ground height as above. I use 64 units since a player's eye level is roughly 64 units above ground. While they may seem similar, the eye points E and voxels Q serve different purposes. I'll use the eye points as locations the current player may look from and the voxels as locations where enemies may appear.
Algorithm Output: Cover Edges
With these definitions, I can now formalize the concept of "locations where enemies may appear". For a player's eye point e, a cover edge is a voxel in Q where an enemy may move from not visible to the player (aka behind cover) to visible to the player (aka not behind cover). We will find these cover edges by looking for voxels that aren't visible from the current eye point e, but are if the player moves to an offset eye point at location e + ε. For small movements ε, it is equivalent for either the player or the enemy to move. For my implementation, ε = 10 units.
Key Detail: Not Every Corner Hides A Cover Edge
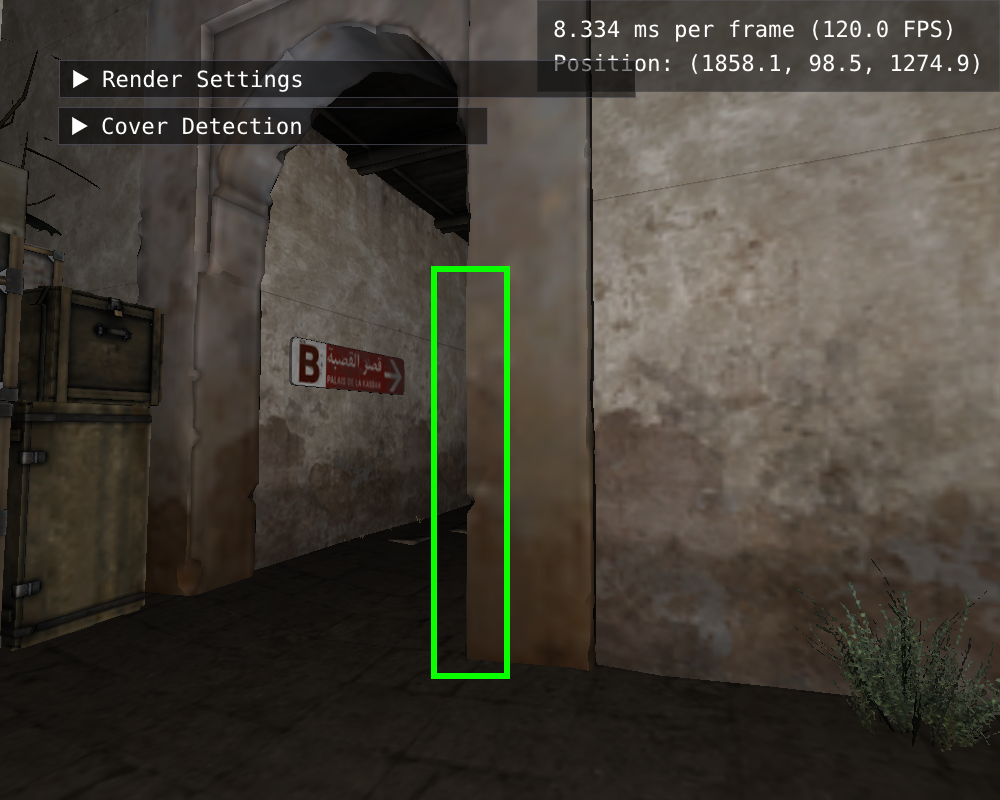
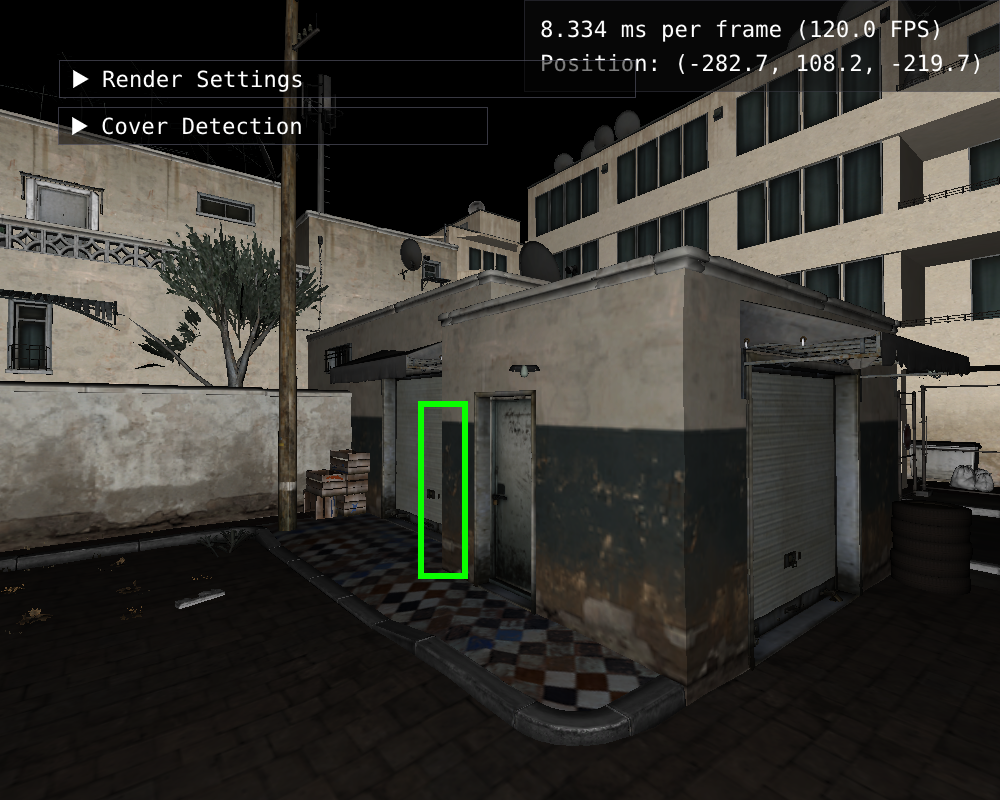
An intuitive definition for cover edges is the areas hidden by corners. This intuition matches the typical advice by CSGO experts to "check the corners" of the map. The green box in the left image below is one such corner that hides a cover edge. However, there are many corners that don't hide cover edges. These corners aren't worth checking because no enemy can hide behind them. The green box in the right image below doesn't hide a cover edge because there isn't enough space behind the corner for a character model. By requiring a whole voxel of size 32x32x72 to be invisible, the cover edge definition filters out these uninteresting corners.
Algorithm Implementation
The following steps are repeated for each eye point e in E to determine the cover edges from that eye point.
- Find All Eye Position Offsets - Choose 9 points in a sphere of radius ε around e. We denote these offset points as e + ε0, ..., e + ε8.
- Ensure Offsets Are Reachable - Trace a ray from e to each e + εi. If the ray hits the map geometry in G before traveling 10 units, e + εi isn't reachable. Otherwise, the offset is reachable.
- Find All Voxels Where Enemies Can Stand And Are Visible From An Offset But Not e - For each voxel q in Q, pick 20 points r, the 8 corners and 12 random points. For each r, trace a ray from each reachable e + εi. If the ray doesn't hit the map geometry in G before reaching r, then r is visible from e + εi. If any r is visible from any e + εi, then q is visible from an offset. If so, check if q is visible from e using the same ray tracing approach for all r. If q is visible from any e + εi but not e, it is a cover edge voxel for e.
Algorithm Performance
The algorithm requires a lot of ray tracing. It needs to trace 20 rays from every eye position and every offset to every voxel in the map. On an AWS g4dn.4xlarge, this takes about 2 hours (note: this number is very rough, as the algorithm has gone through many revisions). Two key system constraints are the GPU memory required to store the voxels in Q and the CPU memory required to store the cover edge voxels for all eye positions in E.
Cover Edge Applications
I will use the algorithm in two applications.
- Evaluating Game Sense - My game sense model will use this algorithm to determine a player's current action, such as peeking (moving into enemy territory and looking at a cover edge) or rotating (moving in friendly territory and not looking at a cover edge). Also, I will evaluate a player's ability to check the right cover edge, the one that enemies are hiding behind, when multiple exist for their current eye position.
- Training Maps - I want to build a map for de_dust2 that teaches which cover edges to look at. Once I incorporate more context data, like where enemies are hiding or where teammates are looking, I can create training maps that teach predictive crosshair placement to new players.
Request For Feedback
If you have questions or comments about this analysis, please email me at durst@stanford.edu. IF YOU ARE A CSGO MAP CREATOR, PLEASE CONTACT ME! I WANT HELP BUILDING THE TRAINING MAPS. I want to automatically create a modified version of de_dust2 with the cover edge voxels shown here. I want the right voxels to appear for a player's current eye position. I don't know how to automatically modify a map to add the voxels. I would prefer to avoid manually adding the voxels in Hammer, since there are a lot of them. This script demonstrates what I want for one eye position.
Footnotes
- In the CSGO community, predictive crosshair placement is known as pre-aiming.